由于这两种模型执行的任务(即规划和执行类人机器人的运动)是相互依存的★✿,研究人员开始设计一种能够同时解决这两个问题的计算方法★✿。
盖世汽车讯 类人机器人佳域g4官网★✿,即身体结构类似人体的机器人或虚拟系统★✿,在现实世界中具有广泛的应用佳域g4官网★✿。它们的四肢和身体与人类相似★✿,因此可以模拟各种人类动作★✿,如行走★✿、蹲伏佳域g4官网★✿、跳跃和游泳等佳域g4官网3亿体育APP官方网站★✿。
通过计算生成虚拟类人形角色的真实动作★✿,可能对开发电子游戏★✿、动画电影佳域g4官网3亿体育APP官方网站★✿、虚拟现实(VR)体验和其他媒体内容发产生有趣的影响3亿体育APP官方网站★✿。然而★✿,电子游戏和动画中所描绘的环境往往是高度动态和复杂的★✿,因此在这些环境中引入类人机器人的规划动作更具挑战性佳域g4官网★✿。
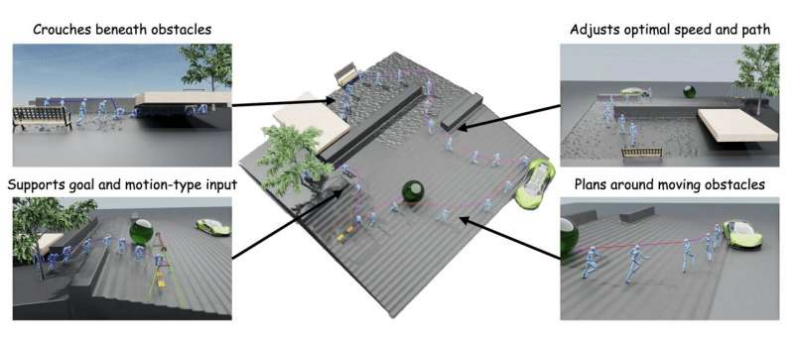
据外媒报道★✿,以色列NVIDIA研究中心(NVIDIA Research)的研究人员最近推出新计算方法PlaMo(规划和移动★✿,Plan and Move)3亿体育APP官方网站3亿体育APP官方网站★✿,可用于规划人形机器人在复杂的3D物理模拟世界中的移动方式佳域g4官网佳域g4官网★✿。在arXiv预印本服务器上发表的一篇论文中介绍了这种方法★✿,该方法由场景感知路径规划器和稳健的控制策略组成★✿。自动流水线★✿,3亿体育-APP官方网站★✿!三亿体育app平台三亿体育三亿体育手机版下载★✿,三亿体育官方三亿体育·(中国)官方网站★✿,
 关于三亿体育
公司简介
生产厂房
荣誉资质
注塑机机械手
富强鑫注塑机机械手
震德注塑机机械手
仁兴注塑机机械手
注塑周边设备
超声波自动切水口机
工业冷水机
自动剪水口机
产品中心
机械手
小型机械手
自动化设备机械手
旋转机械手
伺服机械手
伺服横走式机械手
双截五轴伺服机械手
单截五轴伺服机械手
上下料机械手
桁架机械手
三轴车床机械手
上下料机械手
三轴机械手
三轴牛头伺服机械手
三轴伺服机械手900IS3
五轴机械手
框架式五轴机械手
五轴机械手 单截双臂
单轴机械手
单轴双节双臂机械手-K
斜臂机械手
斜臂机
非标斜臂机
六轴机械手
六轴机器人KMS-CR6-18
KMS-CR6-900
KMS通用型系列六轴
大型牛头伺服机械手
伺服牛头式机械手
大型机械手牛头机1200
应用案例
人工智能
机器人
三亿体育APP下载
公司新闻
行业消息
选购机械手
服务支持
服务承诺
交期准时
售后保障
三亿体育官网
联系我们
三亿体育网站
关于三亿体育
公司简介
生产厂房
荣誉资质
注塑机机械手
富强鑫注塑机机械手
震德注塑机机械手
仁兴注塑机机械手
注塑周边设备
超声波自动切水口机
工业冷水机
自动剪水口机
产品中心
机械手
小型机械手
自动化设备机械手
旋转机械手
伺服机械手
伺服横走式机械手
双截五轴伺服机械手
单截五轴伺服机械手
上下料机械手
桁架机械手
三轴车床机械手
上下料机械手
三轴机械手
三轴牛头伺服机械手
三轴伺服机械手900IS3
五轴机械手
框架式五轴机械手
五轴机械手 单截双臂
单轴机械手
单轴双节双臂机械手-K
斜臂机械手
斜臂机
非标斜臂机
六轴机械手
六轴机器人KMS-CR6-18
KMS-CR6-900
KMS通用型系列六轴
大型牛头伺服机械手
伺服牛头式机械手
大型机械手牛头机1200
应用案例
人工智能
机器人
三亿体育APP下载
公司新闻
行业消息
选购机械手
服务支持
服务承诺
交期准时
售后保障
三亿体育官网
联系我们
三亿体育网站








官方网站")