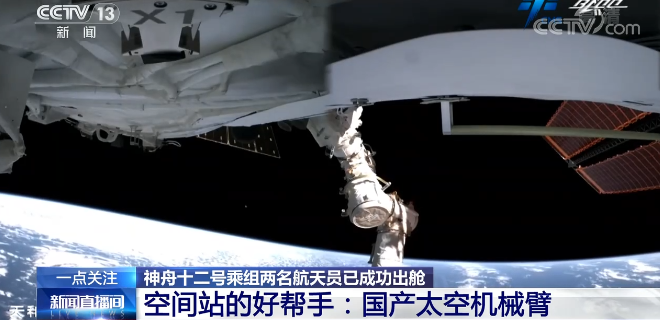
◈ღღ:按计划◈ღღ,在神舟十二号任务期间机器人◈ღღ,◈ღღ,航天员会在机械臂的配合下开展两次舱外作业◈ღღ。中国空间站核心舱上的机械臂◈ღღ,是我国目前智能程度最高◈ღღ、规模与技术难度最大◈ღღ、系统最复杂的空间智能制造系统◈ღღ。在这次出舱前雏形明子三亿体育·(中国)官方网站◈ღღ,机械手臂◈ღღ,◈ღღ,6月27日◈ღღ,全系统进行了空间站机械臂大范围移动测试◈ღღ,一起看一下机械臂测试时的场景三亿体育手机APP◈ღღ,◈ღღ。
在27日的测试画面中◈ღღ,我们可以看到◈ღღ,机械臂通过摆动调整到任务点位后◈ღღ,末端执行器旋转方向对准适配器◈ღღ,通过中心点确定位置完成锁紧◈ღღ。 我们可以通过核心舱外不同角度摄像头拍摄的画面雏形明子◈ღღ,来看一下机械臂的工作状态◈ღღ。

空间站机械臂承担着悬停飞行器抓获◈ღღ、辅助航天员舱外活动◈ღღ、舱外货物搬运◈ღღ、舱体状态检查等重要任务◈ღღ,这些都需要机械臂具备精准控制和强大的自由运动能力◈ღღ。为此◈ღღ,空间站机械臂拥有7处关节雏形明子三亿体育◈ღღ,可以实现类似人类手臂的运动能力◈ღღ,工作时可以承载重达25吨的大型航天器舱段雏形明子◈ღღ。机械臂其实没有手三亿体育◈ღღ,它是靠两端的末端执行器来完成抓取和固定◈ღღ,与目标适配器完成连接后◈ღღ,机械臂就可以进行旋转◈ღღ;而另一端的执行器就成为抓手雏形明子◈ღღ,连接端口可以给机械臂提供电力和数据接口◈ღღ,两个末端执行器轮流抓紧三亿体育◈ღღ、放开3亿体育-APP官方网站◈ღღ,可实现机械臂在舱体进行爬行雏形明子三亿体育◈ღღ,更大范围触达空间站各舱体外表面三亿体育登陆◈ღღ,执行各类航天任务◈ღღ。
航天员执行出舱任务时三亿体育三亿体育平台APP◈ღღ!◈ღღ,可以首先通过脚限位器将自己固定在机械臂末端三亿体育app平台◈ღღ,◈ღღ,将舱外航天员进行大范围转移三亿体育三亿体育◈ღღ,送到任务点位完成设备安装◈ღღ、维修维护等操作作业◈ღღ。
 关于三亿体育
公司简介
生产厂房
荣誉资质
注塑机机械手
富强鑫注塑机机械手
震德注塑机机械手
仁兴注塑机机械手
注塑周边设备
超声波自动切水口机
工业冷水机
自动剪水口机
产品中心
机械手
小型机械手
自动化设备机械手
旋转机械手
伺服机械手
伺服横走式机械手
双截五轴伺服机械手
单截五轴伺服机械手
上下料机械手
桁架机械手
三轴车床机械手
上下料机械手
三轴机械手
三轴牛头伺服机械手
三轴伺服机械手900IS3
五轴机械手
框架式五轴机械手
五轴机械手 单截双臂
单轴机械手
单轴双节双臂机械手-K
斜臂机械手
斜臂机
非标斜臂机
六轴机械手
六轴机器人KMS-CR6-18
KMS-CR6-900
KMS通用型系列六轴
大型牛头伺服机械手
伺服牛头式机械手
大型机械手牛头机1200
应用案例
人工智能
机器人
三亿体育APP下载
公司新闻
行业消息
选购机械手
服务支持
服务承诺
交期准时
售后保障
三亿体育官网
联系我们
三亿体育网站
关于三亿体育
公司简介
生产厂房
荣誉资质
注塑机机械手
富强鑫注塑机机械手
震德注塑机机械手
仁兴注塑机机械手
注塑周边设备
超声波自动切水口机
工业冷水机
自动剪水口机
产品中心
机械手
小型机械手
自动化设备机械手
旋转机械手
伺服机械手
伺服横走式机械手
双截五轴伺服机械手
单截五轴伺服机械手
上下料机械手
桁架机械手
三轴车床机械手
上下料机械手
三轴机械手
三轴牛头伺服机械手
三轴伺服机械手900IS3
五轴机械手
框架式五轴机械手
五轴机械手 单截双臂
单轴机械手
单轴双节双臂机械手-K
斜臂机械手
斜臂机
非标斜臂机
六轴机械手
六轴机器人KMS-CR6-18
KMS-CR6-900
KMS通用型系列六轴
大型牛头伺服机械手
伺服牛头式机械手
大型机械手牛头机1200
应用案例
人工智能
机器人
三亿体育APP下载
公司新闻
行业消息
选购机械手
服务支持
服务承诺
交期准时
售后保障
三亿体育官网
联系我们
三亿体育网站








官方网站")